ઇમેજ એન્જિનિયરિંગ STEVE-6D વપરાશકર્તા માર્ગદર્શિકા

1 પરિચય
STEVE-6D સોફ્ટવેર ડિજિટલ કેમેરાની ઇમેજ સ્ટેબિલાઇઝેશન કામગીરીનું મૂલ્યાંકન કરે છે. નીચેની છબી ભૂતપૂર્વને દર્શાવે છેampTE261 ટેસ્ટ ચાર્ટનો ઉપયોગ કરીને લો-કોન્ટ્રાસ્ટ ત્રાંસી કિનારીઓનું વિશ્લેષણ કરવા માટેનું સેટઅપ. કૅમેરાને STEVE-6D પર માઉન્ટ કરવામાં આવે છે અને પછી વાઇબ્રેટ થાય છે જ્યારે કૅમેરાના ઇમેજ સ્ટેબિલાઇઝેશન ફંક્શનને અલગ-અલગ એક્સપોઝર સમયે ઇમેજ કૅપ્ચર કરવા માટે ચાલુ અને બંધ કરવામાં આવે છે. અહીંથી, સોફ્ટવેર અસ્પષ્ટ ત્રાંસી ધારની કિનારી પહોળાઈનું વિશ્લેષણ કરે છે અને પછી એફ-સ્ટોપ્સમાં સ્થિરીકરણ કામગીરીની ગણતરી કરે છે. આ સોફ્ટવેર iQ-ટ્રિગર અને STEVE-6D હાર્ડવેરને સાઈન વેવ જનરેટર, કસ્ટમ યુઝર વેવફોર્મ્સ અથવા CIPA કસ્ટમ હેન્ડશેક સાથે પણ નિયંત્રિત કરી શકે છે.

STEVE-6D - ટર્નકી સોલ્યુશન
ગ્રાફિકલ યુઝર ઈન્ટરફેસ
STEVE-6D સોફ્ટવેરને બે મુખ્ય મોડ્યુલમાં વિભાજિત કરવામાં આવ્યું છે, એક STEVE-6D હાર્ડવેર સાથેના સંચાર માટે અને બીજું ઇમેજ સ્ટેબિલાઇઝેશન પરફોર્મન્સની ગણતરી માટે [1].

STEVE-6D ના કંપન નિયંત્રણ માટેનું મોડ્યુલ
કંપન નિયંત્રણ મોડ્યુલ
"વાઇબ્રેશન કંટ્રોલ" મોડ્યુલ વેવફોર્મ ડેટા સેટ કરે છે અને વચ્ચેના ઇન્ટરફેસનું સંચાલન કરે છે.
STEVE-6D અને iQ-ટ્રિગર. "વાઇબ્રેશન કંટ્રોલ" ચાર અલગ-અલગ ભાગોમાં વહેંચાયેલું છે, પ્રથમ ભાગ [2] નીચેના ટેબમાં સ્વિચ કરે છે.
કનેક્શન ટેબ
STEVE-6D સાથે કનેક્શન મેળવવા માટે, "કનેક્ટ કરો" બટનને ક્લિક કરો [1], અને STEVE-6D આપમેળે તમામ છ અક્ષોને શૂન્યની સ્થિતિમાં સંદર્ભિત કરશે. ડિસ્કનેક્ટ કરવા માટે, લાલ બટન [2] પર ક્લિક કરો
અધિકાર માહિતી આઇટમ [3] પર માઉસ કર્સરને હોવર કરવાથી કનેક્ટેડ કંટ્રોલર વિશેની માહિતી દેખાશે, જેમ કે ટૂલટિપમાં સીરીયલ નંબર અને ફર્મવેર વર્ઝન.

કનેક્શન ટેબ
પ્રીસેટ્સ ટેબ
કૅમેરા સિસ્ટમને પરિભ્રમણ બિંદુને વ્યાખ્યાયિત કરીને સરળતાથી ગોઠવી શકાય છે, જે પીવટ પોઈન્ટ [1] તરીકે ઓળખાય છે, અને સ્થાનિક ઘર/શૂન્ય સ્થાન [2]. દરેક વેવફોર્મ ડેટા કર્વ આ સ્થિતિનો સંદર્ભ આપે છે.
ડિફૉલ્ટ પીવોટ પોઈન્ટ (x=y=z=0) જાળવી રાખવાની પ્લેટના તળિયે મધ્યમાં સ્થિત છે. તમે તેની સ્થિતિને તમારી એપ્લિકેશન માટે શ્રેષ્ઠમાં બદલી શકો છો. માજી માટેample, મોબાઈલ ફોન સાથે, પીવટ પોઈન્ટને ફોનના કેન્દ્રમાં સેટ કરવાનો અર્થ થાય છે કારણ કે જ્યારે વપરાશકર્તા તેને પકડી રાખે છે ત્યારે આ સામાન્ય રીતે પરિભ્રમણનું કેન્દ્ર હોય છે. જો કે, SLR કેમેરા તેની ખૂબ જ અલગ ભૂમિતિને કારણે પરિભ્રમણનું અલગ કેન્દ્ર ધરાવે છે

પ્રીસેટ્સ ટેબ
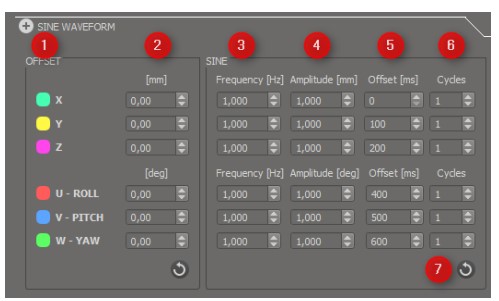
સાઈન વેવફોર્મ ટેબ
દરેક અક્ષ માટે સાઈન વેવ જનરેટર વેવફોર્મ ડેટા સેટ કરવા માટે ઝડપી રીત બનાવે છે. નવા વેવફોર્મને વ્યાખ્યાયિત કરવા માટે, સ્થિતિ [2], આવર્તન [3] સંબંધિત ઑફસેટના મૂલ્યો બદલો, ampલિટ્યુડ [4], અને
સમય ઓફસેટ [5]. "સાયકલ" [6] સ્પિન બોક્સ વ્યાખ્યાયિત કરે છે કે સાઈન કેટલી વાર પુનરાવર્તિત થવી જોઈએ. વેવફોર્મ કરવા માટે, "મૂવ" બટનને ક્લિક કરો. નીચેના જમણા ખૂણે બટન પર ક્લિક કરો [7].
સાઈન વેવફોર્મ ટેબ
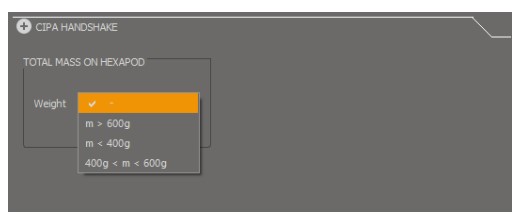
CIPA હેન્ડશેક ટેબ
ત્રણમાંથી કોઈપણ CIPA હેન્ડશેક કરવા માટે, પ્રથમ, ઓપ્ટિકલ સિસ્ટમનું વજન પસંદ કરો. ત્યાંથી, વેવફોર્મ ડેટા આપમેળે STEVE-6D નિયંત્રક પર અપલોડ થાય છે, અને હલનચલન શરૂ થાય છે
જ્યારે મૂવ બટન ક્લિક કરવામાં આવે છે. CIPA નોનડિક્લોઝર એગ્રીમેન્ટને કારણે, "વેવફોર્મ પ્લોટ" માત્ર એક ભૂતપૂર્વ છેample
CIPA હેન્ડશેક ટેબ
કસ્ટમ વેવફોર્મ ટેબ
પ્રમાણભૂત વેવફોર્મ દ્વારા
એક સરળ .txt બનાવીને STEVE-6D પર કસ્ટમ વેવફોર્મ અપલોડ કરો file કાર્ટેશિયન કોઓર્ડિનેટ્સ સાથે. બધા મૂલ્યોને ટેબ સ્ટોપ સાથે અલગ કરવા પડશે. અક્ષનો ક્રમ XYZUV W છે. s સેટ કરોampSTEVE-6D સોફ્ટવેરમાં વેવફોર્મનો લિંગ રેટ અને પછી .txt લોડ કરો file સોફ્ટવેર માટે. બધા કોઓર્ડિનેટ્સ પીવટ પોઈન્ટ અને હોમિંગ પોઝિશનને ધ્યાનમાં લીધા વિના છે. વેવફોર્મ અપલોડ .txt પછી આપમેળે શરૂ થાય છે file STEVE-6D સોફ્ટવેરમાં લોડ થયેલ છે. File પ્રમાણભૂત વેવફોર્મ માટે વ્યાખ્યા: (ટેબનો વિભાજક તરીકે ઉપયોગ કરો)

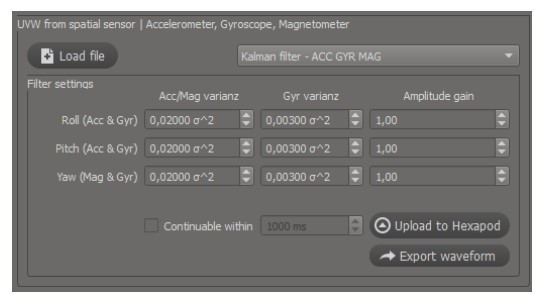
અવકાશી માહિતી દ્વારા
સ્માર્ટફોન (એક્સિલરોમીટર, ગાયરોસ્કોપ, મેગ્નેટોમીટર) જેવા ઉપકરણોનું વિશ્લેષણ કરતી વખતે અવકાશી સેન્સર ડેટાનો ઉપયોગ કરો. વધુ ચોક્કસ પરિભ્રમણ મૂલ્યો મેળવવા માટે, Acc/Mag અને Gyr વેરિઅન્ટ માટે પરિમાણ સેટ કરો.
આ ampલિટ્યુડ ગેઇન માત્ર સ્કેલિંગ માટે છે ampલિટ્યુડ બધા પરિમાણો સેટ થયા પછી, ચળવળ શરૂ કરવા માટે હેક્સાપોડ પર અપલોડ કરો બટનને ક્લિક કરો. ચાલુ રાખવા યોગ્ય ચેકબોક્સ વપરાશકર્તાને વેવફોર્મ ચાલુ રાખવા માટે સમયગાળો સેટ કરવાની મંજૂરી આપશે જ્યાં સુધી શરૂઆતની સ્થિતિ અંતિમ સ્થિતિથી અલગ હોય. ફક્ત એક્સીલેરોમીટર અથવા ગાયરોસ્કોપ ડેટાનો ઉપયોગ કરવાનો વિકલ્પ પણ છે.
નિકાસ વેવફોર્મ બટનનો ઉપયોગ વેવફોર્મને બચાવવા અને IS કામગીરીની ગણતરી માટે કરી શકાય છે. ડેટા એસampલિંગ દર 1000Hz છે
અવકાશી સેન્સર સેટિંગ્સ
File અવકાશી સેન્સરમાંથી UVW માટે વ્યાખ્યા:
| HH:MM:SS.ZZZZ | AccX[જી] | AccY[g] | AccZ[જી] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | મેગ[µt] | મેગ[µt] | મેગ[µt] |
ટ્રિગર ટેબ
રિમોટ કેમેરા રીલીઝ iQ-ટ્રિગર વડે કરી શકાય છે. "વેવફોર્મ પ્લોટ" પર ક્લિક કરીને અથવા iQ-ટ્રિગર ટેબ [3] માં મેન્યુઅલી સમય પસંદ કરીને બહુવિધ પ્રકાશન સમયને વ્યાખ્યાયિત કરવાનું શક્ય છે. જો રેન્ડમ રીલીઝ સમયની જરૂર હોય, તો વેવફોર્મ [2] દીઠ રીલીઝની ગણતરી વ્યાખ્યાયિત કરો. દરેક iQ-ટ્રિગર રીલીઝ શૂટિંગ લેગ, રીલીઝનો સમયગાળો અને બે કેમેરા રીલીઝ વચ્ચેનો ડેલ્ટા સમય [1] દ્વારા વ્યાખ્યાયિત કરવામાં આવે છે.

ઊભી રેખાઓ ડિજીટસ પ્રકાશન સમય સૂચવે છે
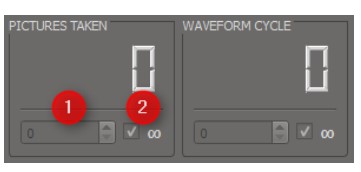
હાર્ડવેર, સ્ટેટસ અને ઈમેજ/વેવફોર્મ કાઉન્ટ પર મોકલો
કનેક્શન સ્થિતિ અથવા ભૂલો વિશેની બધી માહિતી "STATUS" વિસ્તારમાં પ્રદર્શિત થાય છે. ચળવળ શરૂ કરવા માટે, "મૂવ" બટન દબાવો. "હોમ પોઝિશન" બટન પર ક્લિક કરીને, STEVE-6D સીધા જ હોમિંગ પોઝિશન પર જાય છે, જે અગાઉ "પ્રીસેટ" ટૅબમાં સેટ કરવામાં આવી હતી. જો STEVE-6D ને ફરીથી માપાંકિત કરવું જરૂરી હોય, તો "સંદર્ભ પ્લેટફોર્મ" બટનને ક્લિક કરો. જ્યારે “ચિત્ર લીધેલ” અથવા “વેવફોર્મ સાયકલ” માટે મૂલ્ય વ્યાખ્યાયિત કરી રહ્યા હોય, ત્યારે STEVE-6D ની ગતિને આપમેળે રોકવી શક્ય છે. મૂલ્યને અમર્યાદિત [2] પર સેટ કરો અથવા ગણતરીઓની સંખ્યા માટે મૂલ્ય પસંદ કરો [1] iQ-ટ્રિગરે ટ્રિગર થવું જોઈએ, અથવા વેવફોર્મ એક્ઝિક્યુટ થવું જોઈએ.
ડેટાનું વિશ્લેષણ કરો
"ડેટાનું વિશ્લેષણ કરો" મોડ્યુલ ઇમેજ સ્ટેબિલાઇઝેશનની ગણતરી કરે છે. આ મોડ્યુલમાં ત્રણ મહત્વપૂર્ણ ભાગો છે. પ્રથમ ભાગ "મેટાડેટા ટૂલ" [1] છે, જે કેમેરા મેટાડેટા સેટ કરે છે. બીજી
ભાગ IS-પર્ફોર્મન્સ ગણતરી [2] માટે ઇમેજ બેચ પ્રોસેસિંગ છે. અંતિમ ભાગ કબજે કરેલી છબીઓના પરિણામો દર્શાવે છે.
મેટાડેટા
IS-પ્રદર્શન ગણતરીઓ જેમ કે પિક્સેલ પિચ અને શટર સમય માટે કેમેરા મેટાડેટા માહિતી હોવી જરૂરી છે. જો કેમેરા આ માહિતીને ઈમેજમાં રેકોર્ડ ન કરે file, ઈમેજોનો બેચ લોડ કરો અને તેને .jpg ઈમેજમાં મેન્યુઅલી લખો. છબીઓ લોડ કરો, પરિમાણો સેટ કરો અને પછી "SET" બટન દબાવો.
ફક્ત JPEG છબીઓ માટે
IS-પ્રદર્શન ગણતરી માટે છબીઓ લોડ કરો
એકવાર સંદર્ભ શ્રેણી લોડ થઈ જાય, પછી IS-ON માટે ટેસ્ટ શ્રેણી પસંદ કરો. ISOFF માટે ઓછામાં ઓછી એક છબી શ્રેણી જરૂરી છે. જો CIPA હેન્ડશેક વેવફોર્મનો ઉપયોગ કરવામાં આવ્યો હોય, તો IS-OFF માટેની ટેસ્ટ શ્રેણીની જરૂર નથી.
તેના બદલે, CIPA માટે બટન પર ક્લિક કરો અને પછી કેમેરાનું વજન પસંદ કરો. કસ્ટમ વેવફોર્મ માપનમાંથી છબીઓ કસ્ટમ મોશન ડેટા બટન પર ક્લિક કરીને લોડ થઈ શકે છે. "ઇમેજ સેન્ટરનું વિશ્લેષણ કરો
માત્ર” ચેકબોક્સ ઝડપી પરંતુ ઓછા ચોક્કસ ડેટા માટે ઉપલબ્ધ છે. આ વિકલ્પ પસંદ કરતી વખતે, ગણતરી દરમિયાન ફક્ત મધ્યમ કિનારી બોક્સનો ઉપયોગ કરવામાં આવે છે.

એકવાર વિકલ્પો પસંદ કરવામાં આવે, એક વૃક્ષ view નીચે જોયા મુજબ વિવિધ શ્રેણીઓ દેખાશે. જો કોઈ ઇમેજ મેટાડેટા ઉપલબ્ધ નથી, તો પછી "મેટાડેટા ટૂલ" નો ઉપયોગ કરો, જે ભૂલ સંદેશ દ્વારા સૂચવવામાં આવે છે.
STEVE-6D સોફ્ટવેર પર ઈમેજો લોડ થયા પછી. એકવાર પૂર્ણ થઈ ગયા પછી, "પ્રક્રિયા" બટનને ક્લિક કરીને ઇમેજ સ્ટેબિલાઇઝેશન કામગીરીની ગણતરી શરૂ કરી શકાય છે. પરિણામ file સિંગલ એજ પહોળાઈની ગણતરીઓ ઈમેજો સાથે ફોલ્ડરમાં સાચવવામાં આવશે.
| સમાપ્તિ સમય [ઓ] | પિચ [પિક્સ] | યૌ [પિક્સ] | Sqrt(p^2+y^2) |
IS-પ્રદર્શન
કિનારીની પહોળાઈ IS-પ્રદર્શન μm વિ. એક્સપોઝર સમયની ગણતરી કરે છે. ISON અને IS-OFF (અથવા ગતિ ડેટા) શ્રેણીની ધારની પહોળાઈને પોસ્ટકાર્ડના કદમાં રૂપાંતરિત કરવામાં આવે છે viewઆ પ્રક્રિયાને પૂર્ણ કરવા માટે 65-80 સે.મી.નું અંતર કાપવું પડશે. એફ-સ્ટોપ્સ [2] માં ઇમેજ સ્ટેબિલાઇઝેશન પ્રદર્શન 63μm [1] ની નિર્ધારણ મર્યાદા સાથે IS-ON અને IS-OFF વળાંકના આંતરછેદ બિંદુઓ દ્વારા સ્થિત છે. IS-પ્રદર્શનનું સંખ્યાત્મક મૂલ્ય એફ-સ્ટોપ્સમાં પ્રદર્શિત થાય છે.

પરિણામ ડેટા પસંદગી
IS-પ્રદર્શન ગણતરીના એકલ પરિણામો પસંદ કરવા માટે, “SERIES” માટે એક સ્લાઇડર [1] ખસેડો.
"એક્સપોઝર સમય," "ચિત્ર," અથવા "ROI" (રુચિનો પ્રદેશ). આ ચાલ પ્રદર્શિત બદલશે
એજ સ્પ્રેડ ફંક્શન ("ESF") [3], અવકાશી આવર્તન પ્રતિભાવ ("SFR") [4], અને
"ઇનપુટ ઇમેજ" [5] ટેબ. વિગતવાર માહિતી “INFO” બટન [6] વડે બતાવી અથવા છુપાવી શકાય છે.

એજ સ્પ્રેડ ફંક્શન (ESF)
ESF દરેક ધારની પહોળાઈની ગણતરી કરે છે. આમ, એક ઓવરampદરેક ઈમેજમાંથી ROIની ગણતરી ઈમેજની LEED ત્રાંસી ધારથી કરવામાં આવે છે. દરેક ઈમેજમાં વીસ ત્રાંસી ધારનો સમાવેશ થાય છે, જેમાં પીચમાં દસ અને
દશ વાગવાની દિશામાં.
અવકાશી આવર્તન પ્રતિભાવ (SFR)
SFR નો ઉપયોગ IS-પ્રદર્શન ગણતરી માટે થતો નથી. તેના બદલે, તે દરેક ROI ના મોડ્યુલેશન ટ્રાન્સફર કાર્યનું વર્ણન કરે છે.
ઇનપુટ છબી અને ROI પસંદગી
દરેક પરિણામ માટે રુચિના ક્ષેત્રને બદલવું અથવા પ્રદર્શિત કરવું શક્ય છે. "ROIs સંપાદિત કરો" બટન પર ક્લિક કરો અને ROI નું સ્થાન બદલો. નવો ROI સેટ કરવા માટે, બટન પર ક્લિક કરો અને ROI કાઢી નાખવા માટે "-" બટનનો ઉપયોગ કરો. ઝૂમિંગ ઇફેક્ટ માટે, "ઝૂમ +" બટનને ક્લિક કરો અને ઇમેજ પર એક લંબચોરસ દોરો.
હેન્ડલિંગમાં ભૂલ
જો સોફ્ટવેર એક ઈમેજ પર તમામ 20 ROI શોધી શકતું નથી, તો ઈનપુટ ઈમેજ લિસ્ટ દરમિયાન ભૂલ આવી છે. view. જો આવું થાય, તો કૃપા કરીને છબી પસંદ કરો અને છબી માટે ખૂટતા ROI ને મેન્યુઅલી વ્યાખ્યાયિત કરો.
Cઓપીરાઈટ INFORMATION
આ સૉફ્ટવેર ઇન્સ્ટોલ કરીને, તમે નીચે દેખાતી સૉફ્ટવેર લાયસન્સ કરારની શરતોથી બંધાયેલા રહેવા માટે સ્વીકારો છો અને સંમત થાઓ છો.
કૉપિરાઇટ © ઇમેજ એન્જિનિયરિંગ જીએમબીએચ એન્ડ કંપની કેજી, 2021
આ કરાર હેઠળ આપવામાં આવેલ સૉફ્ટવેર "જેમ છે તેમ" ધોરણે પ્રદાન કરવામાં આવે છે, કોઈપણ વૉરંટી અથવા રજૂઆતો વ્યક્ત અથવા ગર્ભિત કર્યા વિના, કોઈ ચોક્કસ હેતુ માટે વેપારીતા અથવા યોગ્યતાની કોઈપણ ગર્ભિત વૉરંટી સહિત, પરંતુ તેના સુધી મર્યાદિત નથી. ચોક્કસ હેતુ અથવા ઉપયોગ માટે સોફ્ટવેરની યોગ્યતા નક્કી કરવાની જવાબદારી ફક્ત ઉપભોક્તાની છે. ઈમેજ એન્જીનીયરીંગ જીએમબીએચ એન્ડ કો.
KG, અને અન્ય કોઈપણ કે જેઓ આ સૉફ્ટવેરના નિર્માણ, ઉત્પાદન, વિતરણ અથવા સમર્થનમાં સામેલ છે, તે કોઈ પણ સંજોગોમાં કોઈપણ ખામી, ભૂલ અથવા ચૂકને કારણે પ્રત્યક્ષ, પરોક્ષ, વિશેષ, પરિણામલક્ષી અથવા આકસ્મિક નુકસાન માટે જવાબદાર રહેશે નહીં. ડિસ્કેટ અથવા સૉફ્ટવેરમાં અથવા અન્ય કોઈપણ ઇવેન્ટ્સમાંથી, સેવામાં કોઈપણ વિક્ષેપ, નફા અથવા સદ્ભાવનાની ખોટ, કાનૂની કાર્યવાહી અથવા અન્ય કોઈપણ પરિણામી નુકસાન સહિત, પરંતુ તેના સુધી મર્યાદિત નથી. વપરાશકર્તા આ સૉફ્ટવેરનો ઉપયોગ કરવાથી ઉદ્ભવતી તમામ જવાબદારી સ્વીકારે છે, જેના માટે ઇમેજ એન્જિનિયરિંગ જીએમબીએચ એન્ડ કંપની કેજીની કોઈ જવાબદારી રહેશે નહીં, પછી ભલેને આવો ઉપયોગ કાયદેસર હોય કે અગમ્ય હોય. ઇમેજ એન્જીનીયરીંગ જીએમબીએચ એન્ડ કંપની કેજી પાસે આ સોફ્ટવેર દ્વારા સંગ્રહિત અથવા ઉપયોગમાં લેવાતા કોઈપણ ડેટા અથવા પ્રોગ્રામ્સ માટે કોઈ જવાબદારી રહેશે નહીં, જેમાં આવા ડેટા અથવા પ્રોગ્રામ્સને પુનઃપ્રાપ્ત કરવાના ખર્ચનો સમાવેશ થાય છે. ઈમેજ એન્જીનીયરીંગ જીએમબીએચ એન્ડ કંપની કેજી કોઈપણ સમયે, કોઈપણ સમયે, સૂચના આપ્યા વિના પ્રદાન કરેલ માહિતી અને સંબંધિત સોફ્ટવેરમાં સુધારા અથવા સુધારા કરવાનો અધિકાર અનામત રાખે છે.
આ માર્ગદર્શિકા વિશે વધુ વાંચો અને PDF ડાઉનલોડ કરો:
દસ્તાવેજો / સંસાધનો
 |
ઇમેજ એન્જિનિયરિંગ STEVE-6D [પીડીએફ] વપરાશકર્તા માર્ગદર્શિકા સ્ટીવ-6ડી, સ્ટીવ |



